Robotten på videoen kører ligeud fremad indtil farvesensoren (
Sensor Guide, How to Use the Color Sensor) monteret foran på robotten registrerer
den sorte streg. Når det sker stopper robotten.
Programmet som bestemmer robottens opførsel ser sådan her ud:
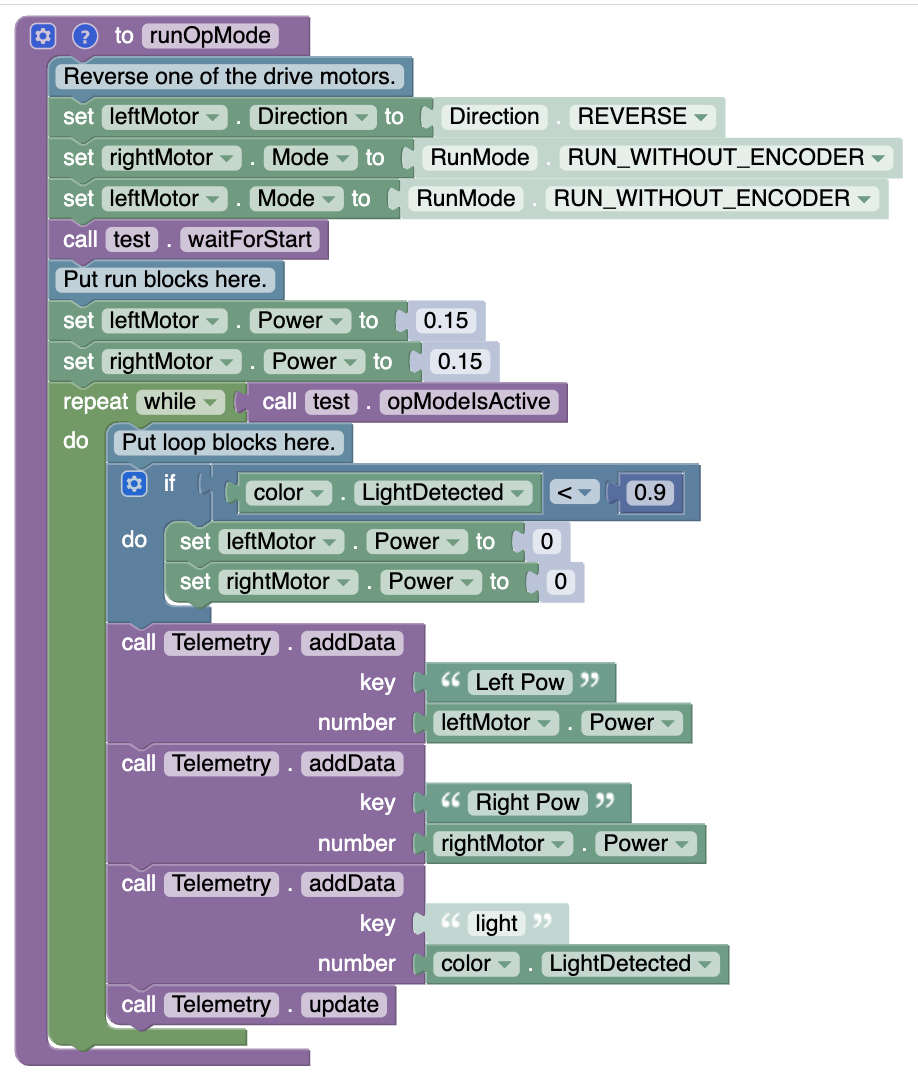 De to motorer har i dette program fået navnene leftMotor og rightMotor mens farvesensoren
har fået navnet color i konfigurationsfilen som hører til programmet.
De to motorer har i dette program fået navnene leftMotor og rightMotor mens farvesensoren
har fået navnet color i konfigurationsfilen som hører til programmet.