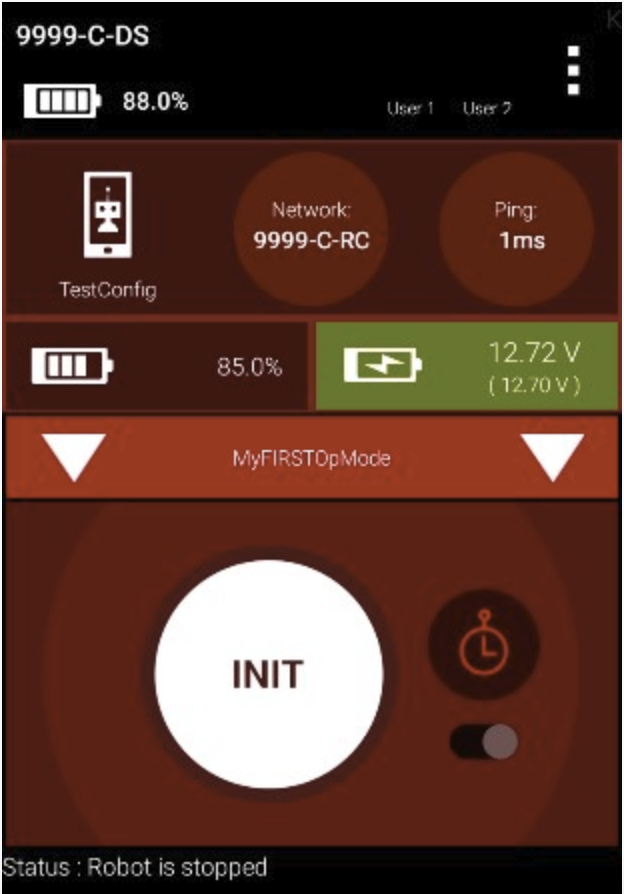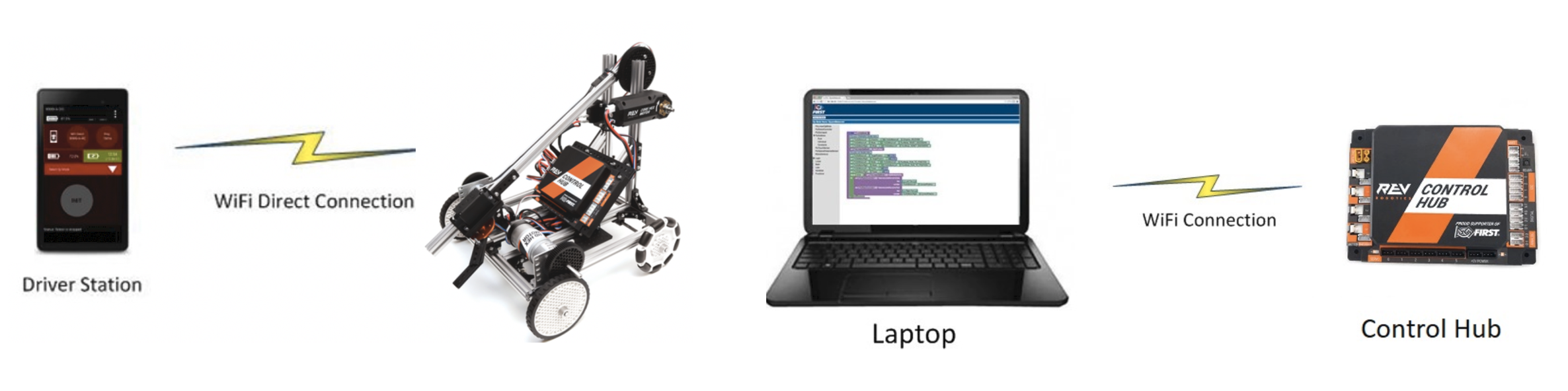
- både fra Driver Station, som beskrevet i Control System Startup Guide
- og fra en browser på en laptop.
- En konfigurationsfil (configuration file) som skabes på Driver Station og gemmes på Robot Controller, se Control System Startup Guide, afsnit 3 Configure Your Robot, eller se i Configuring Your Hardware, Creating a Configuration File Using the Driver Station. Husk, konfigurationsfilen skal være aktiveret fra Driver Station før et program kan afvikles på Robot Controller.
- Et program som skabes på Driver Station eller på laptop skal være gemt på Robot Controller. Navne på sensorer og motorer i programmet skal være defineret i konfigurationsfilen. Der findes to typer programmer kaldet TeleOp og Autonomous. Et program af typen Autonomous kan ikke modtage input fra en gamepad via Driver Station, det kan et program af typen TeleOp. Typen vælges i programmeringsværktøjet.