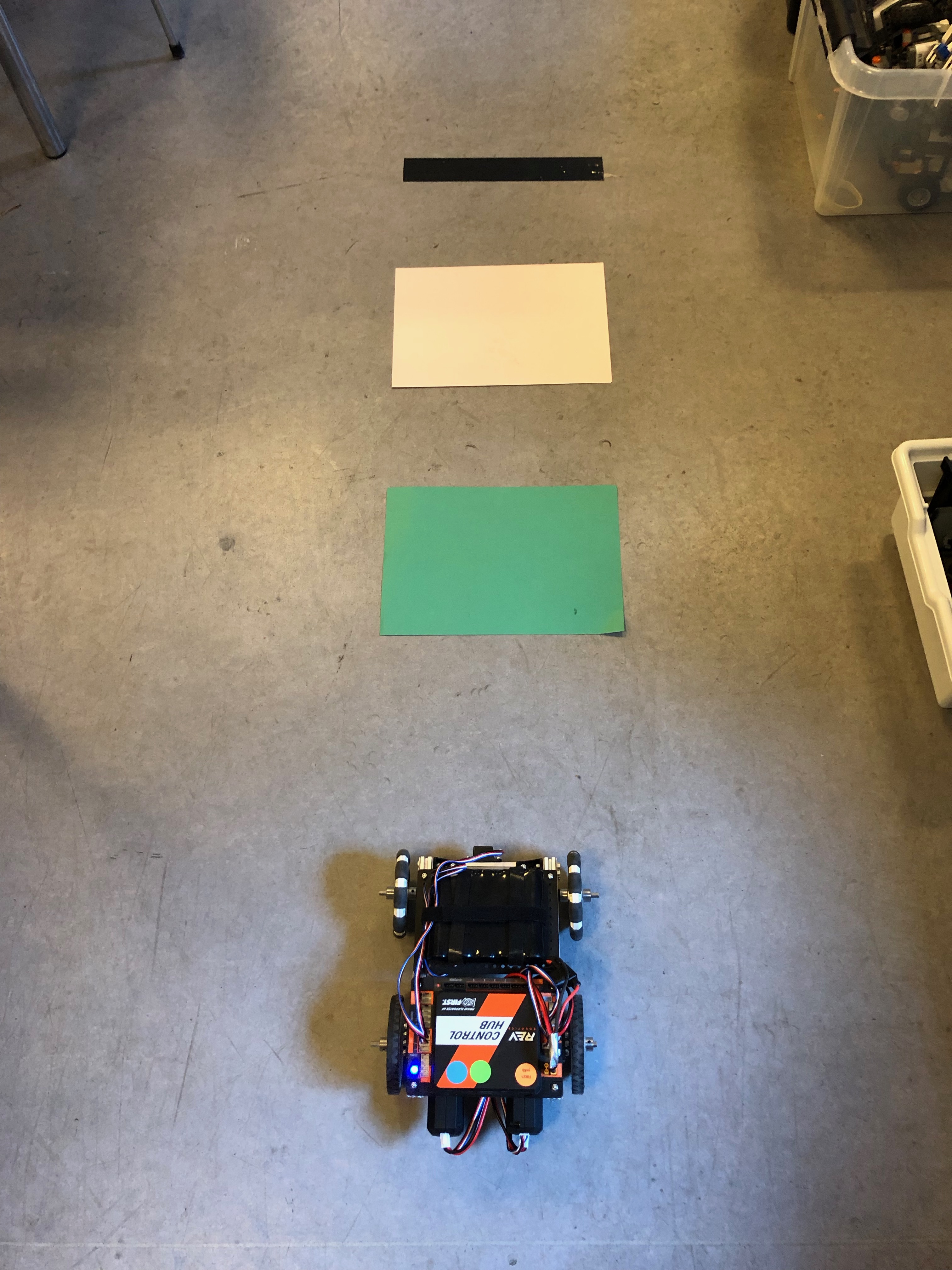
Nedenfor ses en første prototype af banen i udfordring 1. Detaljer omkring banemål, baneelementer,
pointgivning osv kommer senere. Regn dog med, at de farvede felter er A4 papir og at banen afsluttes med en stribe
sort gaffatape.
Find farver
Robotten starter i et startområde i bunden af billedet. Robotten skal køre ligeud henover en række farvede felter, her en mørk grøn A4 side og en lyserød A4 side. Robotten skal registrere farverne på de farvede felter. Når en farve er registreret skal farvenavnet vises på skærmen af Driver Station. Robotten skal stoppe på den sorte strimmel gaffatape. På den endelige bane vil der være 4 felter og det er ukendt hvilken rækkefølge felterne er placeret i. Robotten skal opføre sig autonomt efter den er blevet startet.
Robotten starter i et startområde i bunden af billedet. Robotten skal køre ligeud henover en række farvede felter, her en mørk grøn A4 side og en lyserød A4 side. Robotten skal registrere farverne på de farvede felter. Når en farve er registreret skal farvenavnet vises på skærmen af Driver Station. Robotten skal stoppe på den sorte strimmel gaffatape. På den endelige bane vil der være 4 felter og det er ukendt hvilken rækkefølge felterne er placeret i. Robotten skal opføre sig autonomt efter den er blevet startet.
Robotten på videoen nedenfor kører ligeud fremad indtil farvesensoren (
Sensor Guide, How to Use the Color Sensor) monteret foran på robotten registrerer
den sorte streg. Når det sker stopper robotten. Undervejs bruger programmet farvesensorens aflæsninger til at registrere
de to farvede felter.
Når et farvet felt er registreret vises farvenavnet på skærmen af Driver Station, som det ses på videoen
.
Programmet som bestemmer robottens opførsel ser sådan her ud ( Programmet
kan hentes som Challenge1.blk):
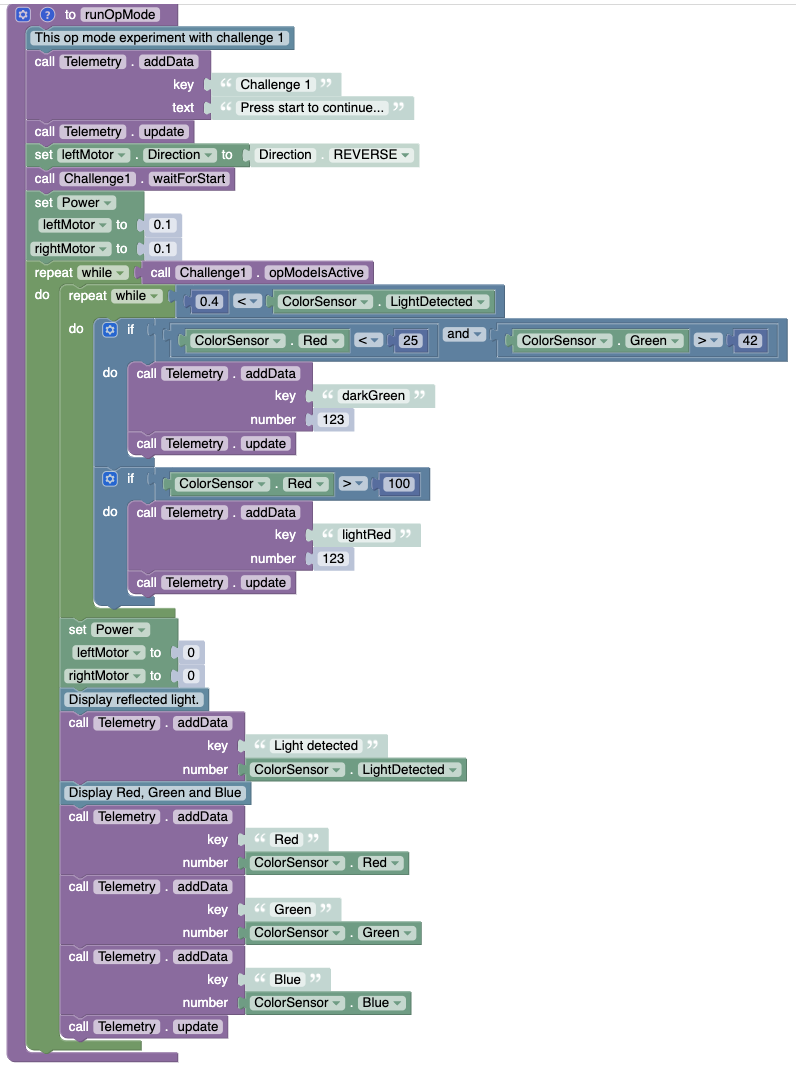 Inden programmet blev udformet blev det grå gulv, den mørk grønne A4 side og den lyserøde A4 side målt til henholdsvis:
Inden programmet blev udformet blev det grå gulv, den mørk grønne A4 side og den lyserøde A4 side målt til henholdsvis:
- Grå, reflected light 1.0, red 32, green 39 og blue 30,
- Mørk grøn, reflected light 1.0, red 22, green 48 og blue 31 og
- Lysrød, reflected light 1.0, red 112, green 118 og blue 30.