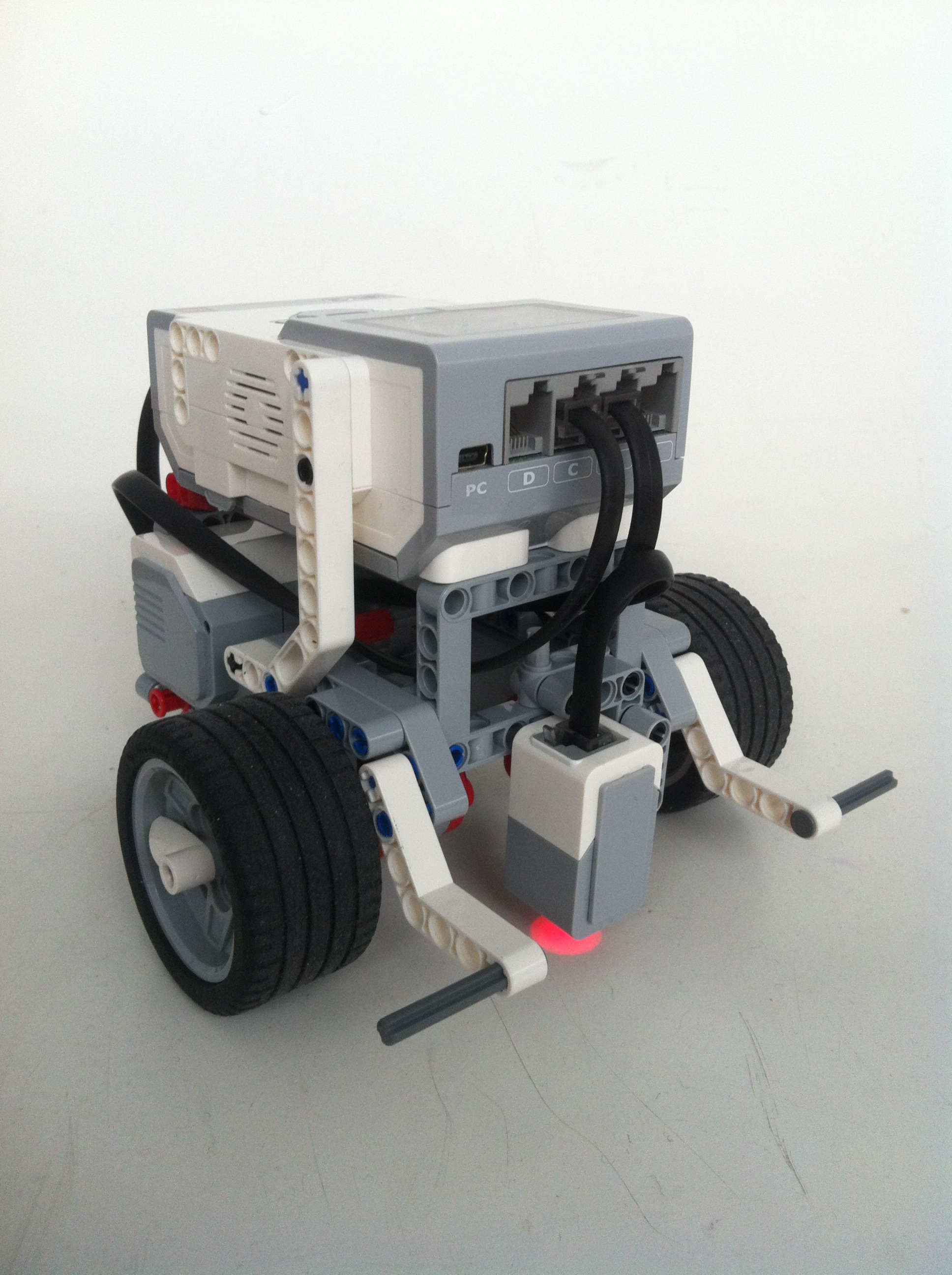
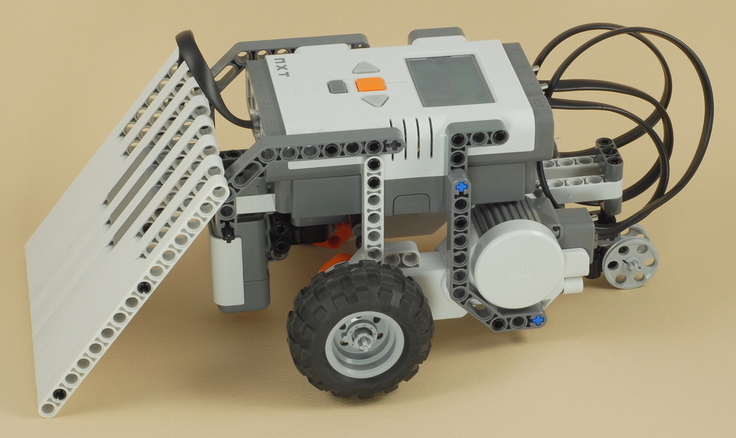
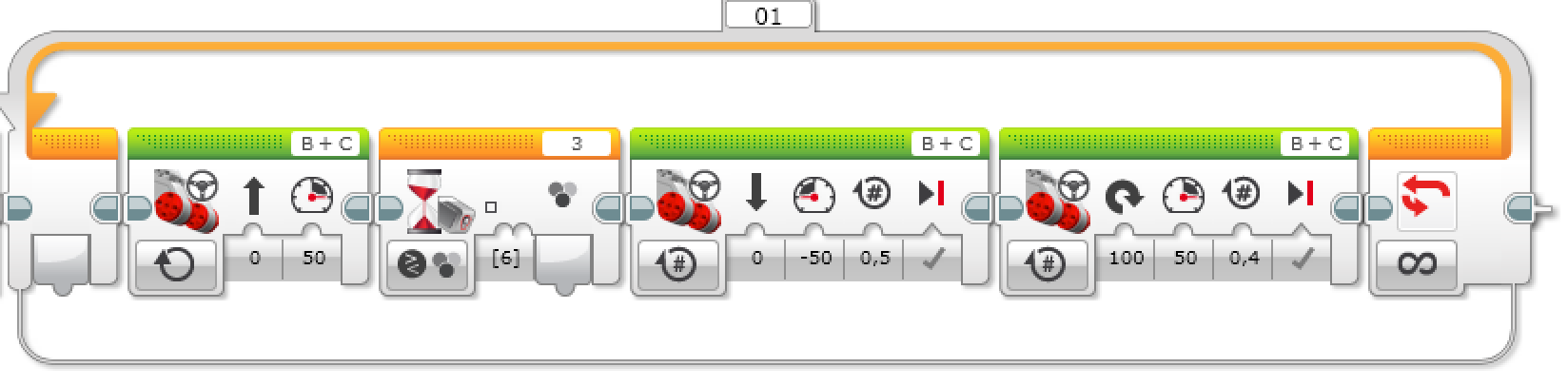
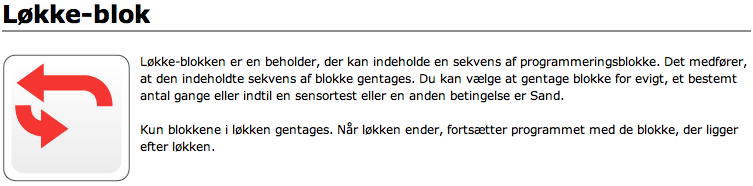
Simpelt sumo bryder programDen simple EV3 baserede sumo bryder, sumoBot, eller den NXT baserede mini sumo bot:kan begge, altsĺ bĺde EV3 og NXT kontrolenheden, programmeres ved hjćlp af det grafiske programmeringsvćrktřj EV3-G til EV3. I EV3 brugervejledning, side 36 forklares, hvordan vćrktřjet installeres pĺ en computer og hvilke introduktioner til programmering, som vćrktřjet indeholder, bl.a. Quick Start og Robot Educator. Programmeringsvćrktřjet kan lćres gennem brug. Start f.eks. med det simple program, som er foreslĺet til at styre den NXT baserede Mini sumo bot. En EV3-G udgave af programmet, som fĺr f.eks. sumoBot til at holde sig pĺ en bane med en hvid kant, kan ses her: Programmet findes i EV3 projektet Sumo.ev3 med navnet SumoBot. De to motorer skal vćre forbundet til port B og C, mens farvesensoren skal vćre forbundet til port 3. Begynd med at overfřre projektet til EV3/NXT kontrolenheden og start programmet SumoBot. En křrsel med sumoBot ser f.eks. sĺdan her ud: Ved at observere robottens opfřrsel pĺ videoen kan det ses, hvilken virkning de enkelte programmeringsblokke i programmet har pĺ robottens opfřrsel. SumoBot programmet bestĺr af 5 programmeringsblokke: En lřkke-blok samt 4 programmeringsblokke, som lřkke-blokken omslutter. Se eventuelt under EV3 hjćlp > Programmeringsblokke > Flow-blokke > Lřkke: Lřkke-blokken har den virkning, at robotten gentager de handlinger, som de 4 programmeringsblokke inde i lřkke-blokken fĺr robotten til at udfřre. De handlinger som robotten gentager er:
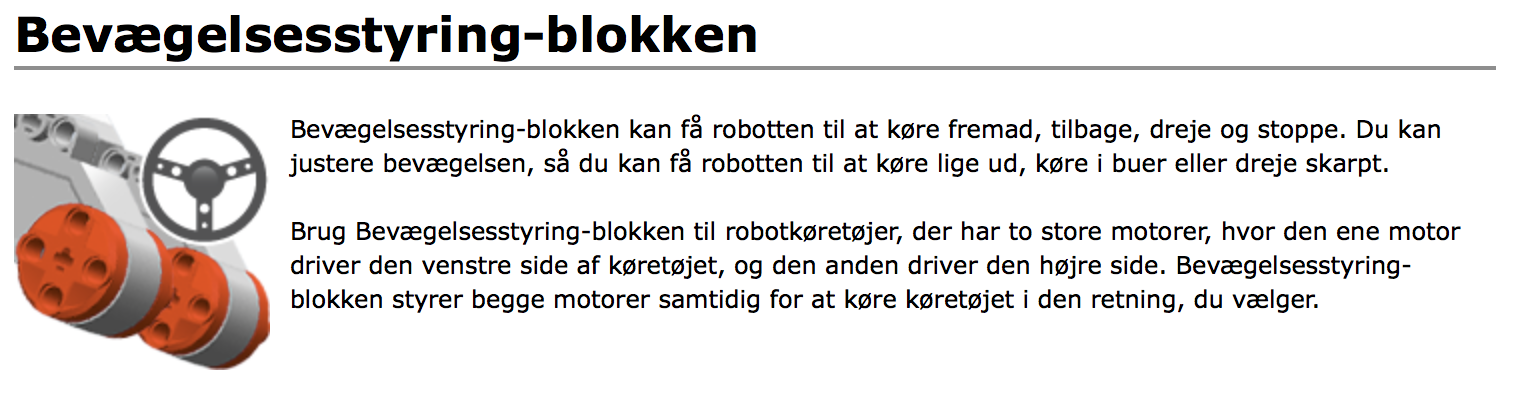
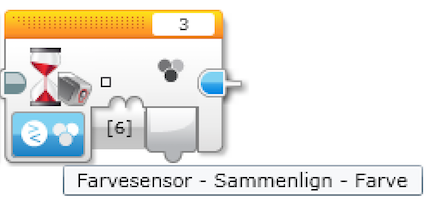
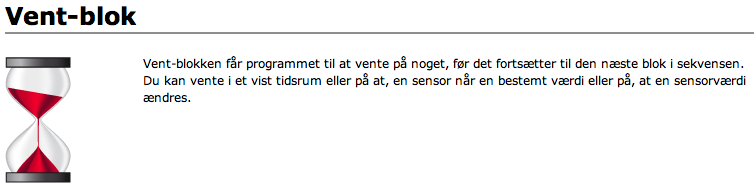
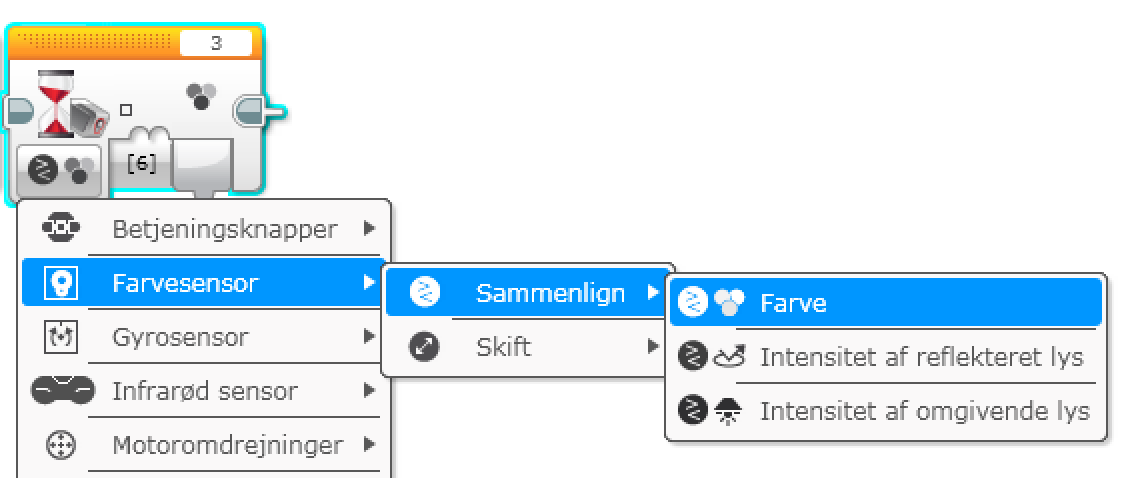
Mens robotten křrer fremad og ligeud, igangsat af den fřrste bevćgelsesstyring-blok, benytter robotten farvesensoren til at holde řje med om robotten er kommet hen til den hvide kant. Farvesensoren bruges altsĺ i programmet til at registrer farven pĺ den overflade, som robotten křrer pĺ lige nu. Nĺr hvid farve registreres er robotten ved den hvide kant. I programmets anden blok, en vent-blok, venter programmet indtil farvesensoren har registreret hvid. Nĺr det sker gĺr programmet videre til den nćste blok, som jo fĺr robotten til at bakke vćk fra kanten. Se eventuelt EV3 hjćlp > Programmeringsblokke > Flow-blokke > Vent: Indstillingen af vent-blokken til Farvesensor-Sammenlign-Farve sker sĺdan her: |