|
Start med at bygge en base robot og påmontere en farvesensor, så kanten af sumo ringen kan registreres og
robotten dermed kan programmeres til at undgå at kører ud af ringen.
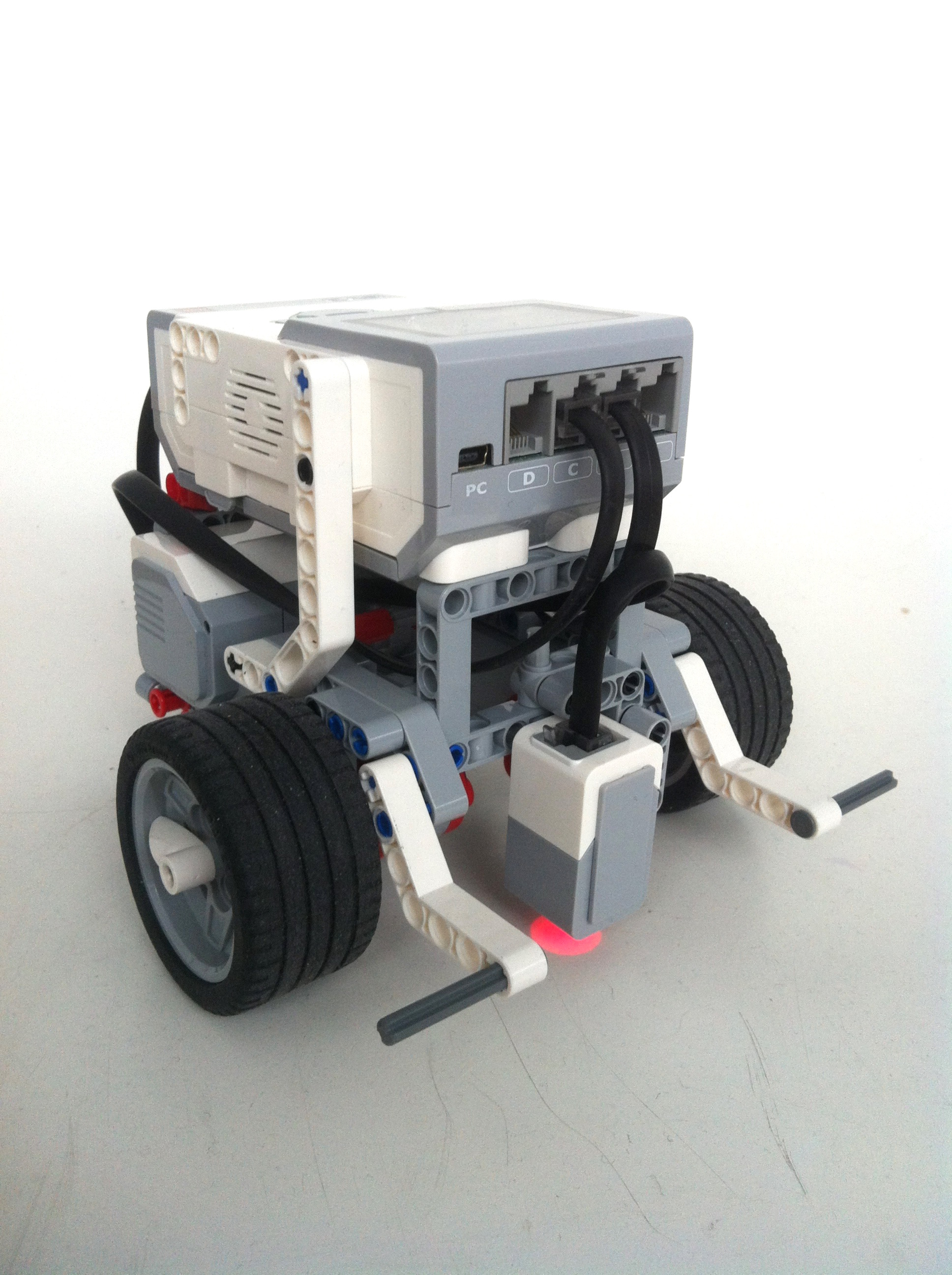
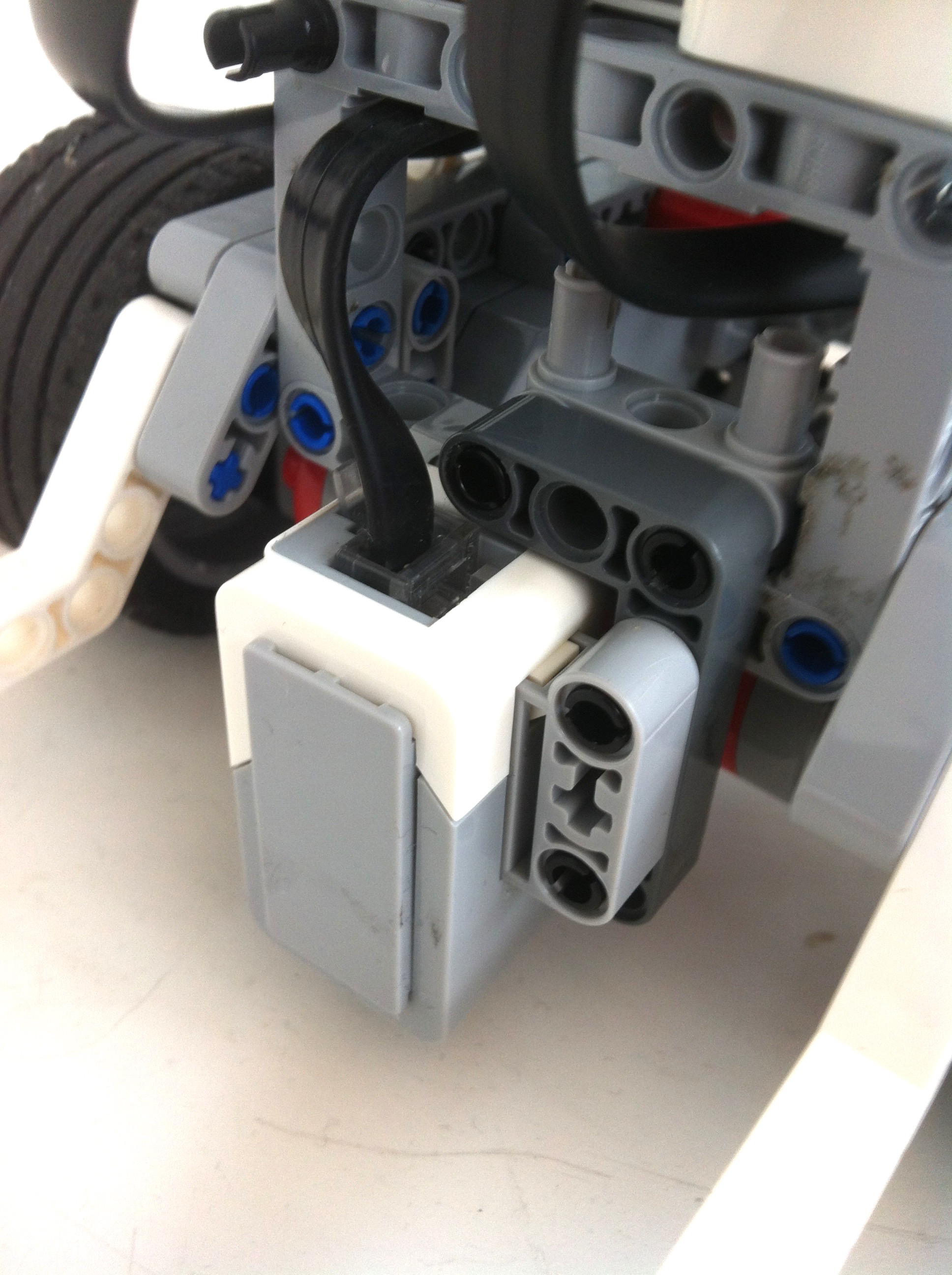
Derefter kan eksperimenterne begynde. F.eks. med at påmontere en afstandssensor til at registrere modstanderen, påmontere større/mindre hjul, påmontere beskyttelsesskjolde i siderne eller en motor, så modstanderen kan vippes. Base robotMed udgangspunkt udelukkende i delene i LEGO EV3 Core Set 45544:og byggevejledningen som følger med sættet: kan der bygges en simpel base robot ved at følge vejledningen fra side 7 til side 38. Base robot med farvesensorBase robotten kan påmonteres en farvesensor sådan her:Detaljerne i farvesensor påmonteringen kan ses her (klik på billeder for at se dem i stor størrelse): |