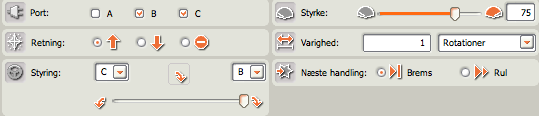
For at få robotten til at dreje på stedet skal Styring i konfigurationspanelet indstilles, så den hvide markeringen i midten på stregen føres ud til den ene af de to yderpositionr, f.eks. til højre. Det betyder, at de to motorer indstilles til at køre i hver sin retning. Når kør ikonet udføres, drejer robotten til højre på stedet og stopper, når begge motorer har drejet en omgang, altså 1 rotation, i hver sin retning. Brug en vinkelmåler til at måle, hvor mange grader robotten drejer. Hvor langt mon robotten drejer, når hjulene sættes til at dreje 2 rotationer? Prøv. Og 0,5 rotationer, altså en halv omdrejning af hjulene? Eksperimenterne med kør ikonet og forskellige antal rotationer viser, at hvis begge hjul sættes til at dreje i modsat retning og med samme motorstyrke er resultatet, at robotten drejer på stedet. Hvor stor en vinkel robotten drejer afhænger af antal rotationer: Jo flere rotationer, jo større vinkel. I trekant programmet er det jo meningen, at robotbilen skal dreje 360/3 grader = 120 grader. Ud fra eksperimenterne ses det, at en drejning på 120 grader fås, når hjulene drejer mere end 0,5 rotationer og mindre end 1 rotation. For at få et mere præcist billede af hvordan vinklen afhænger af antallet af rotationer, kan vinklen måles for flere forskellige antal rotationer omkring de 0,5 til 2 rotationer. F.eks. en halv rotation, en rotation, en og en halv samt to rotationer. I et eksperiment med motorstyrke 75 måltes vinkler som vist i tabellen:
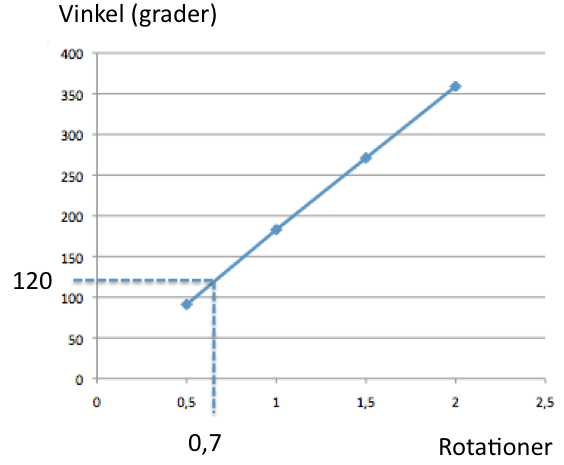
Indsættes de fire målinger i et koordinatsystem med antal rotationer udad x aksen og vinklen opad y aksen, kan de fire punkter forbindes med tre linier. Og de tre linier udgør næsten en samlet ret linie igennem de fire punkter. Antages, at nye målinger også vil føre til punkter, som ligger på den samlede rette linie, kan linien bruges til at finde antal rotationer, som får robotbilen til at dreje 120 grader. Find 120 grader på y aksen, følg den stiplede linie fra 120 grader til et punkt på x aksen. Aflæs værdien på x aksen altså cirka 0,7 rotationer. Prøv drej på stedet med den rotationsværdi.
Når antal rotationer er 0, må vinklen være 0, bilen drejer jo ingen steder. Punktet (0,0) er altså også et målepunkt. En ret linie imellem (0,0) og målepunktet for antal rotationer 0,5 ses at have samme retning som de tre liniestykker og de fem målepunkter ser ud til at ligge på en ret linie. Målepunkter for antal rotationer ud over 2 kunne også tænkes at følge mønstret og ligge på linien. Så en rimelig antagelse ud fra eksperimenterne vil være, at nye målinger vil føre til målepunkter som ligger på en linie som starter i (0,0), går nogenlunde igennem de fire målepunkter og fortsætter opad.
Antagelsen om at alle målepunkter vil ligge på en ret linie, fører til, at vinklen kan udregnes ud fra antal rotationer som:
Faktoren 183 på højre side af ligningen er den vinkel som robotbilen drejer, når hjulene drejer 1 rotation. Ligningen giver for en halv rotation en vinkel på 183x0,5 grader = 91,5 grader som er 0,5 grader fra målingen i tabellen, for 1,5 fås 183x1,5 grader = 274,5 grader, som er 2,5 grader fra måleresultatet i tabellen, og for 2 rotationer giver ligningen 366, en forskel til tabellens måleresultat på 7 grader. Måske en lidt stor afvigelse, men det kan også være udtryk for, at motorstyrke er for høj til, at målingerne kommer til at ligge på en næsten ret linie. Ligningen passer for rotationer = 0. Ligningen ser altså ud til at kunne bruges til at udregne den vinkel robotbilen vil dreje for det antal rotationer, som angives i konfigutrationspanelet for kør ikonet. Ligningen kan bruges til at udregne antal rotationer hjulene skal køre så robotbilen drejer 120 grader, nemlig:
og dermed:
Prøv med 0,66 rotationer og mål om det bliver mere nøjagtigt end med 0,7 rotationer som blev prøvet før. Husk
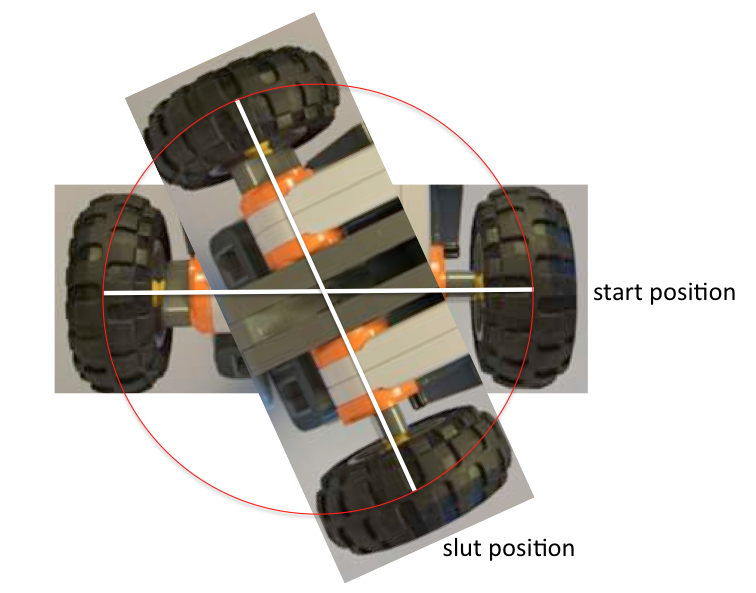
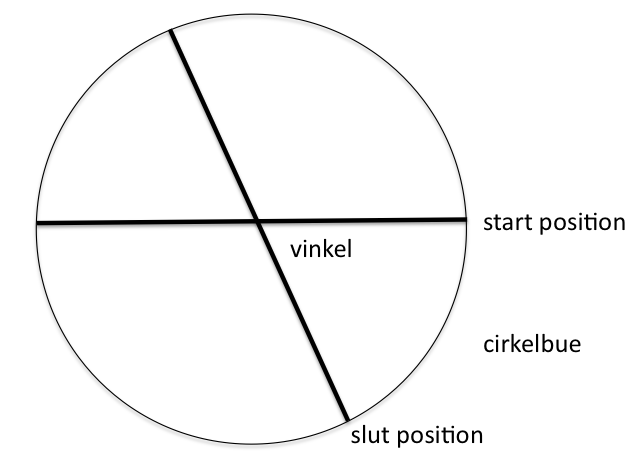
Når de to hjul drejer 1 rotation i modsat retning, viser eksperimenterne, at robotbilen som beskrevet drejer en vinkel på cirka 183 grader. Med større hjul vil robotbilen nok dreje en større vinkel, når større hjul drejer 1 rotation. Og med en større afstand mellem hjulene, vil robotbilen nok dreje en mindre vinkel. Hvordan mon drejningsvinklen afhænger af hjulenes størrelse og afstanden imellem hjulene? Start med at konstatere, at robotbilen i eksperimenterne ser ud til at dreje om et punkt, som ligger midt imellem de to hjul.
Når robotbilen drejer, kører de to hjul rundt på en cirkel med centrum i omdrejningspunktet. Cirklen diameter er afstanden imellem hjulene. Med større hjul kommer robotbilen længere rundt på cirklen og drejningsvinklen bliver større, med større afstand imellem hjulene bliver cirklens omkreds større, hjulene kommer altså ikke så langt på 1 rotation og vinklen bliver mindre. Den vinkel robotbilen drejer afhænger altså ikke blot af antal rotationer hjulene kører, men også af hjulets størrelse og afstanden imellem hjulene.
Ud fra den strækning hjulene tilbagelægger rundt på cirklen er det muligt at udregne vinklen, udfra hjulstørrelse, hjulafstand og antal rotationer. En hel tur rundt på cirklen er 360 grader. Længden af cirkelbuen som hjulene kører er jo det stykke af hele turen, som robotbilen drejer. Derfor bliver vinklen:
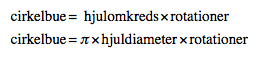
Drejer robotbilen en cirkelbue som er en fjerde del af hele omkredsen bliver vinklen altså 90 grader. Cirkelomkredsen kan beregnes ud fra hjulafstanden som:
Længden af cirkelbuen er jo den strækning som robotbilens hjul kører. I Kør lige ud blev en sådan strækning beregnet ud fra hjulets omkreds og antal rotationer hjulet kører. Det kan bruges til at beregne cirkelbuens længde som:
Indsættes udtrykket for cirkelomkreds og cirkelbue i formlen for vinklen fås:
For basisrobotten er hjuldiametren 5,6 cm og afstanden imellem hjulene cirka 11,5 cm. Forholdet imellem hjuldiameter og hjulafstand er altså cirka 0,5. Dvs at faktoren som rotationer skal ganges med er 180 grader. Det passer jo fint med de 183 grader som blev målt. Formlen viser også, at større hjul giver større drejningsvinkler for samme antal rotationer, og at større hjulafstand giver mindre vinkler. Ganske som forventet. Prøv at eksperimentere med forskellige hjul og hjulafstande. |