På videoen ses et robot kæledyr, som bevæger sig frem og tilbage, drejer, siger lyde og vipper med følehornene:
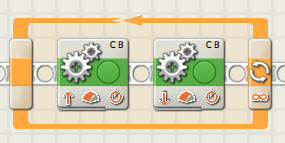
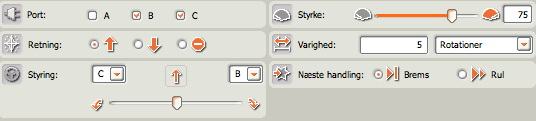
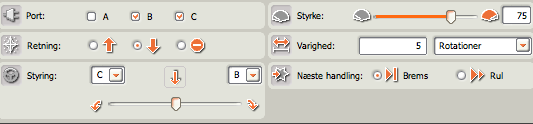
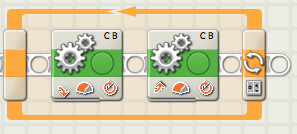
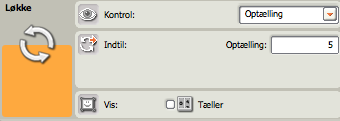
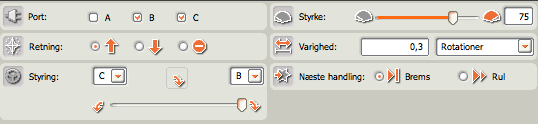
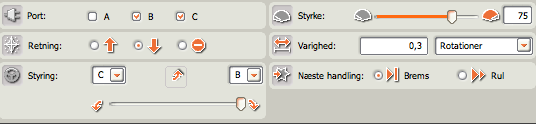
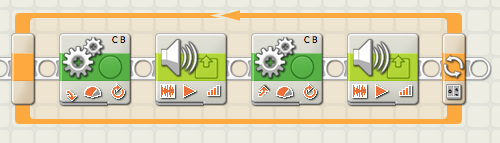
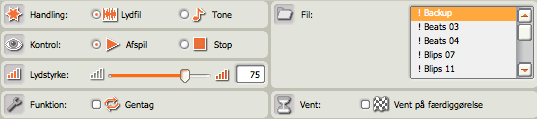
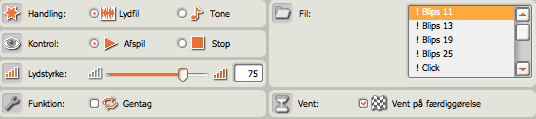
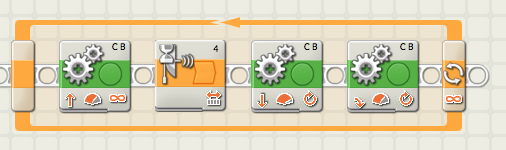
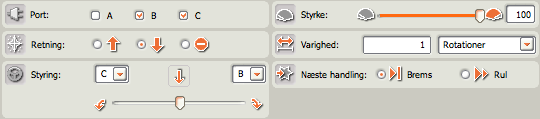
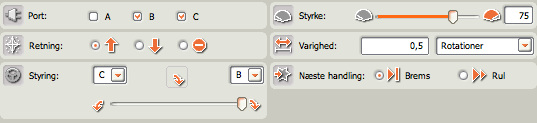
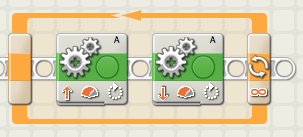
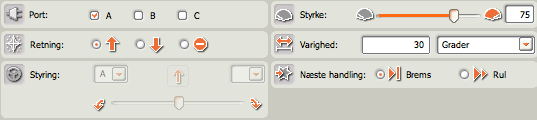
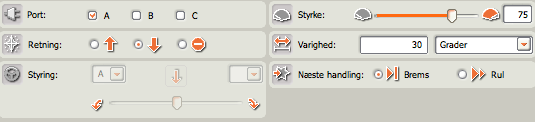
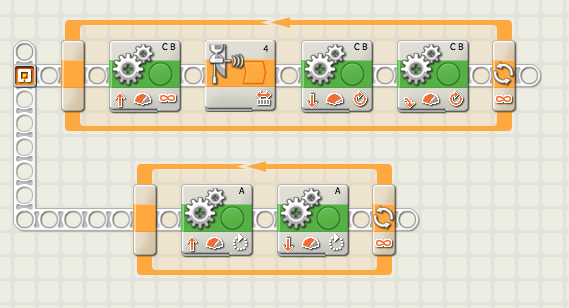
Det er et program, som styrer robot kæledyret. Nu vises en række eksempler på NXT programmer, som får et robot kæledyr til at bevæge sig og sige lyde (se eventuelt I gang med NXT programmering). Robot kæledyret kører frem og tilbage hele tidenPå videoen ses, hvordan robot kæledyret bevæger sig frem og tilbage hele tiden:Programmet, som styrer robot kæledyret på videoen, ser sådan her ud : Det er de to kør-ikoner, som får roboten til at bevæge sig frem og tilbage. Da de to kør-ikoner er anbragt inde i et løkke-ikon, gentages motorernes bevægelser frem og tilbage til NXT stoppes. Se eventuelt i Kør-ikon og Løkke-ikon efter flere detaljer. Konfigurationspanelerne for de to kør-ikoner ser sådan her ud: Prøv at ændre på Styrke for de to motorer, så den ikke er 75. Prøv også at ændre på Rotationer, så værdien ikke er 5. Robot kæledyret drejer fra side til side fem gangePå videoen ses, hvordan robot kæledyret drejer sig fra side til side fem gange:Programmet, som styrer robot kæledyret på videoen, ser sådan her ud : Det er de to kør-ikoner, som får roboten til at bevæge sig fra side til side. Da de to kør-ikoner er anbragt inde i et løkke-ikon, gentages motorernes bevægelser netop fem gange, som valgt i konfigureringspanelet for løkke-ikonet: Konfigurationspanelerne for de to kør-ikoner ser sådan her ud: Prøv at ændre på Styrke for de to motorer, så den ikke er 75. Prøv også at ændre på Rotationer, så værdien ikke er 0,3. Robot kæledyr med lydePå videoen ses, hvordan robot kæledyret drejer sig fra side til side fem gange, mens robot kæledyret siger lyde:Programmet, som styrer robot kæledyret på videoen, ser sådan her ud : Det er de to lyd-ikoner, som får roboten til at sige lyde. Se eventuelt i Lyd-ikon efter detaljer. Konfigurationspanelerne for de to lyd-ikoner ser sådan her ud: Det første lyd-ikon får robotten til at spille lyden "! Backup", det andet får robotten til at spille lyden "Blips 11". Den første lyd spilles imens robotten bevæger sig da Vent på færdiggørelse ikke er valgt. I det andet lyd-ikon er Vent på færdiggørelse valgt og derfor står robotten stille, mens lyden spilles. Robot kæledyr undgår forhindringerPå videoen ses, hvordan robot kæledyret undgår at støde ind i forhindringer f.eks vægge:Programmet, som styrer robot kæledyret på videoen, ser sådan her ud : Det første kør-ikon i løkken får robot kæledyret til at køre ligeud fremad indtil det næste ikon, vente-ikonet opdager en forhindring. Det er vente-ikonet, som får robotten til at holde øje med forhindringer. Når robot kæledyret opdager en forhindring, bakker robotten lidt og drejer cirka en kvart omgang. Og så starter robotten forfra med at køre ligeud fremad igen. Konfigurationspanelerne for det første kør-ikon ser sådan her ud: I Varighed er "Ubegrænset" valgt, så robotten bliver ved med at køre indtil robotten får noget andet at vide af de næste ikoner i programmet. Konfigurationspanelerne for vente-ikonet ser sådan her ud: Programmet bruger et vente-ikon til at holde øje med f.eks. forhindringer. Det sker ved, at programmet hele tiden læser værdien af afstandssensoren, kaldet ultralydssensor, som sidder på Port 4. Når værdien fra afstandssensoren, altså en målt afstand, er mindre end ( < ) 20 cm skyldes det, at en forhindring foran robotten er tættere på robotten end 20 cm. Når det sker, fortsætter programmet til det næste ikon, som i dette tilfælde er et kør-ikon, der får robotten til at bakke. Se eventuelt i Vent-ikon.pdf efter flere detaljer. Konfigurationspanelerne for de to kør-ikoner, som får robotten til at bakke og dreje, ser sådan her ud: Bevægelse af halePå videoen ses, hvordan robot kæledyret bevæger en hale frem og tilbage:Programmet, som bevæger halen frem og tilbage på videoen, ser sådan her ud : De to kør-ikoner i løkken får aksen forbundet til motor A til at vippe op og ned. Konfigurationspanelerne for de to kør-ikoner ser sådan her ud: Motor A er valgt i de to kør-ikoner. Varighed er sat til 30 grader. Det betyder, at motor A drejer 30 grader den ene vej i det første ikon og så 30 grader den anden vej i det andet kør-ikon. Halen bevæger sig samtidig med at robot kæledyret undgår forhindringerPå videoen ses, hvordan robot kæledyret bevæger halen frem og tilbage samtidig med at robotten undgår at støde ind i forhindringer f.eks vægge:Programmet, som styrer robot kæledyret på videoen, ser sådan her ud : Øverst ses programmet, som får robotten til at undgå forhindringer. Nederst ses det program, som får robotten til at vippe med halen. De to programmer er sat sammen på en sådan måde, at de får robotten til at gøre de to ting samtidigt. Se eventuelt i Sekvensbjælke efter flere detaljer. |