![]()
Sidst opdateret 13.8.18.
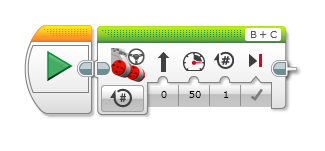
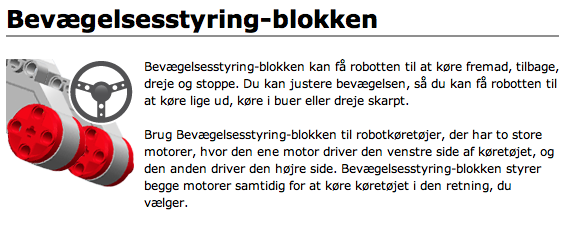
Programmering af kørsel med basePrøv nu at se, hvordan robot basen kører ved at bruge et simpelt program med blot en programmeringsblok, en bevægelsesstyring-blok:Programmet får robotten til at køre fremad: Hjulene roterer en omdrejning inden robotten stopper. Hold øje med den hvide "pil" inde i hjulene, som viser, at der netop køres en omdrejning. Opgave 1: De forskellige indstillingsmuligheder i bevægelsesstyring-blokken er beskrevet i EV3 hjælp. Find beskrivelsen ved i programmeringsværktøjet at gå ind i Vis EV3 hjælp: Vælg dernæst Programmeringsblokke og under Handlingsblokke vælg Bevægelsesstyring:
Opgave 2: Prøv at sætte flere bevægelsesstyring-blokke efter hinanden og få på den måde robotten til f.eks. at køre et stykke frem og så bakke det samme stykke tilbage.
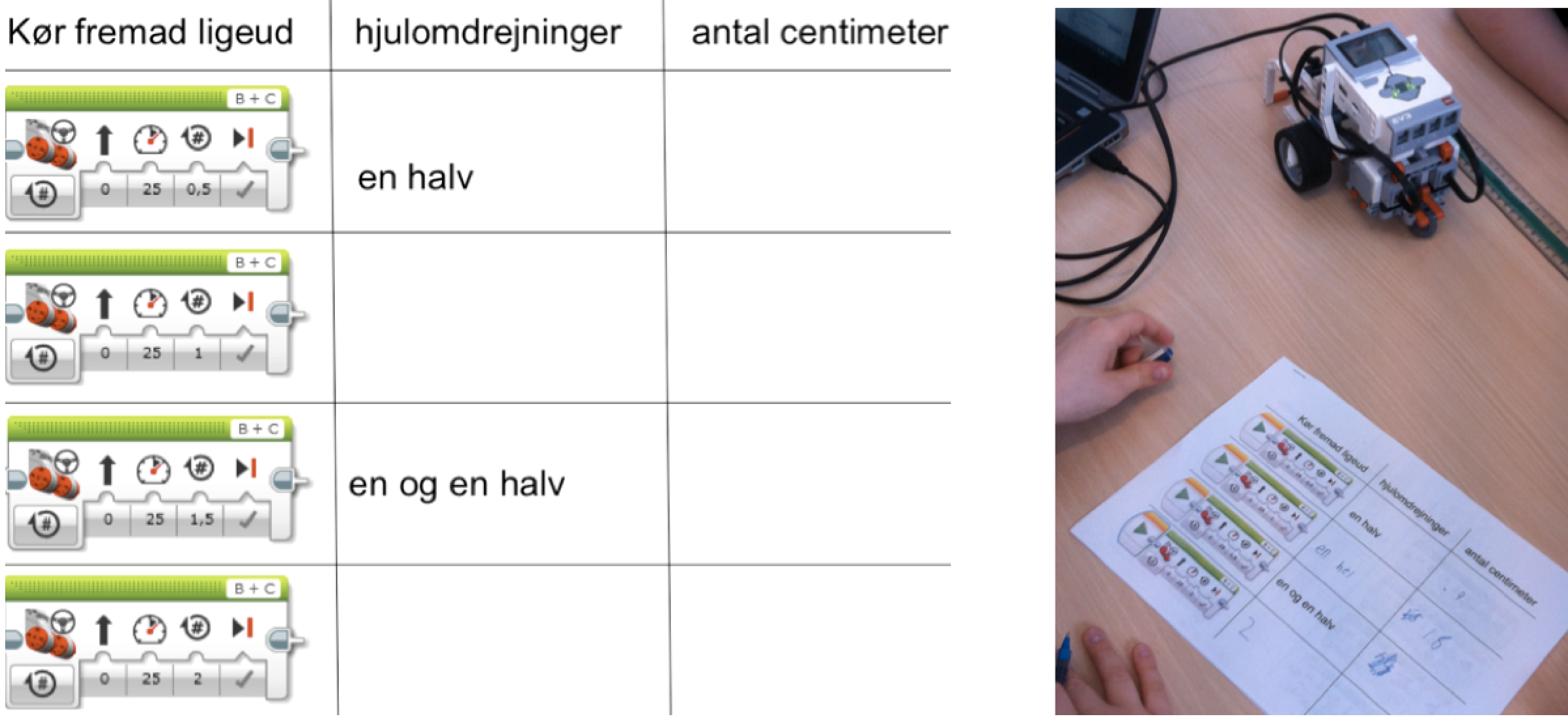
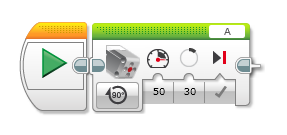
Opgave 3: For at få en fornemmelse af hvor lang en strækning målt i centimeter robotten kører ligeud afhængig af antal hjulomdrejninger, lav da kørsler med forskellige antal hjulomdrejninger, som f.eks. vist i dette skema:Udfyld f.eks. de tre skemaer i opgaveark (PDF fil) så fremad og tilbage kørsler undersøges. Og det undersøges også, hvor meget robotten drejer på stedet afhængig af hjulomdrejninger. Programmering af redskabsmotorPrøv nu at undersøge, hvordan redskabsmotoren på robot basen bevæger armen. Brug et simpelt program med blot en programmeringsblok, en mellemstor motor-blok:Redskabsmotoren er sat til at dreje 30 grader med Strøm 50. Stil armen sådan her: Så kan det ses om armen drejer op eller ned. Opgave 4:Måske er det en idé at kigge i EV3 hjælp for mellemstor motor-blok: |